一、技术硬核:当卫星信号消失,无人机靠什么看世界?
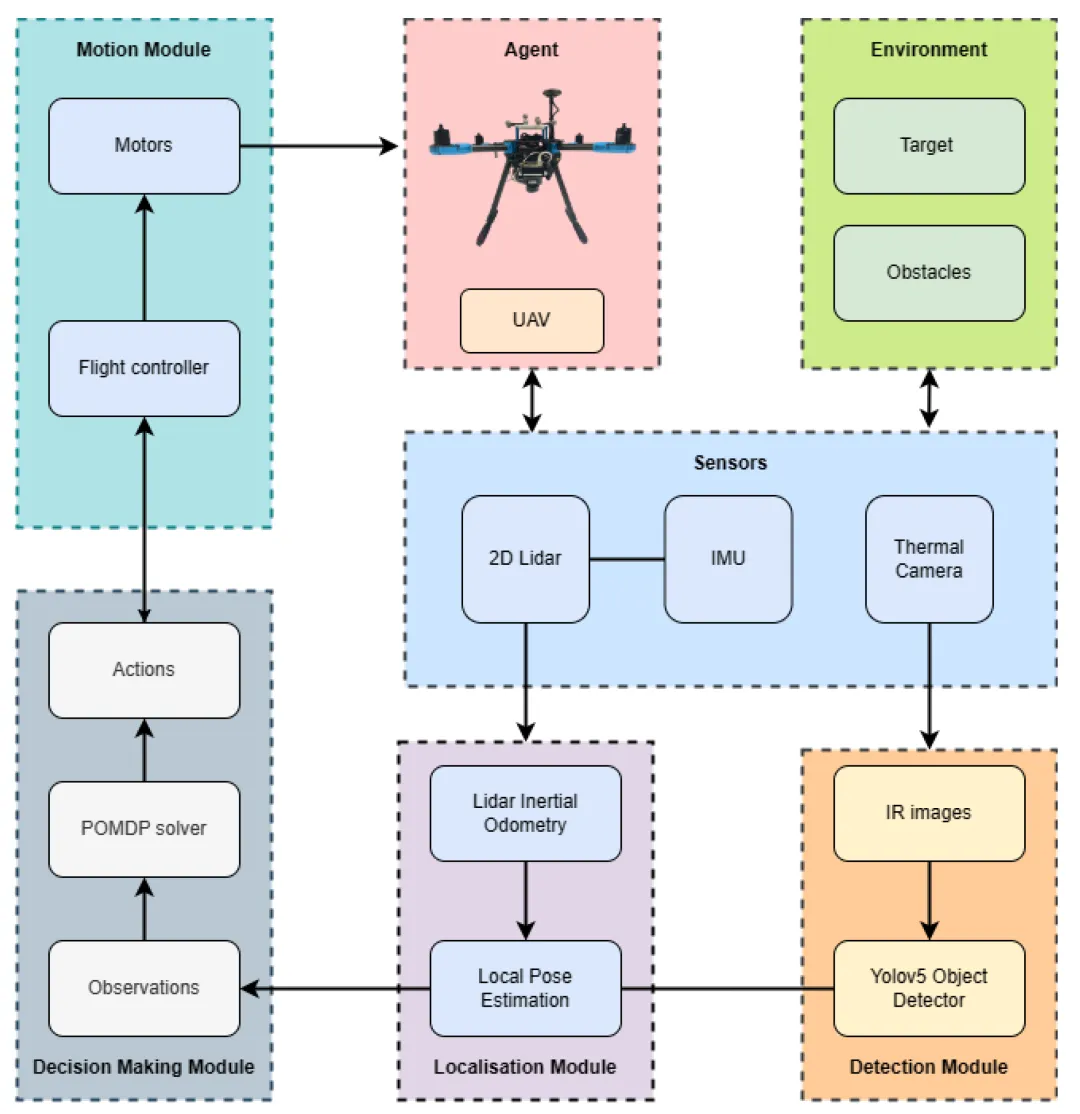
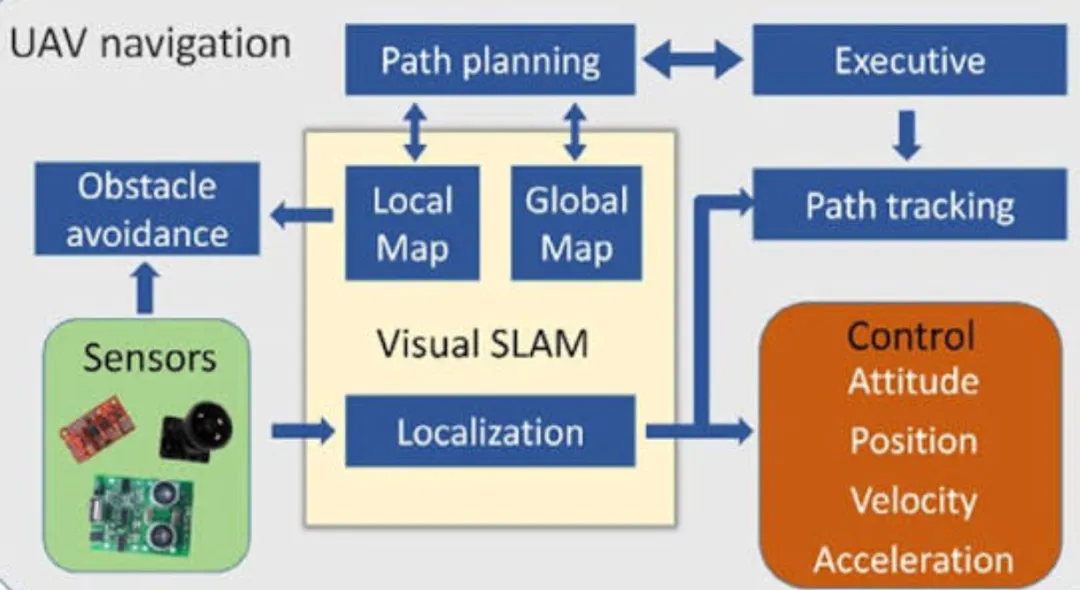
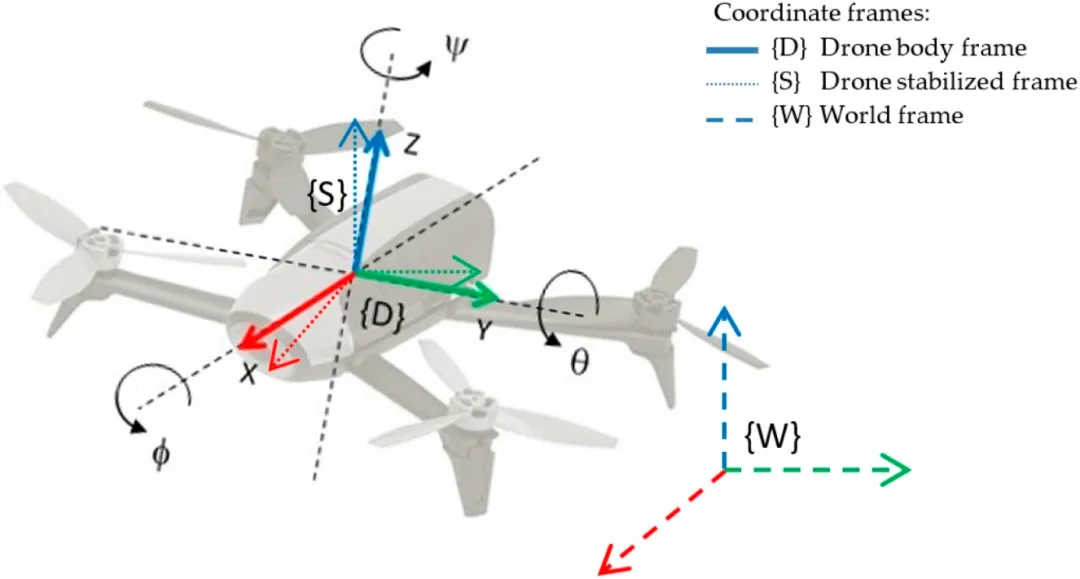
1. 视觉惯性里程计 (VINS / VIO)
2. 激光雷达 SLAM (LiDAR SLAM)
3. 语义导航与空间智能 (Semantic & Spatial Intelligence)
二、全球产业版图深度扫描:谁是“全自主”王者?
Nova 2:专为室内近战设计的四旋翼,能在完全无 GPS、无通信环境下自动探索复杂建筑物。 V-BAT:垂直起降长航时无人机,具备在强电子对抗环境下执行蜂群协同任务的能力。
| 企业/机构 | 技术焦点与现状 |
| 大疆创新 (DJI) | 视觉感知天花板。虽然消费级产品依赖 GPS,但其行业级 Matrice 300/350 RTK 及 Mavic 3E 系列的视觉悬停稳定性是全球标杆。其内部预研的“全向感知”已具备极强的无 GPS 短时作业能力。 |
| 苏州荷清智能 | 工业级自主巡检。源自清华系团队,专注于煤矿、隧道等全封闭无信号场景。采用激光雷达 SLAM 方案,实现了工业级的“一键自主巡检”。 |
| 联核科技 | 特定场景定位。专注于仓储环境,利用视觉标签(AprilTag)或纹理匹配实现无 GPS 的厘米级定位。 |
| 高校力量 | 港科大 (HKUST) 沈劭劼教授团队与 浙江大学 在 VINS(视觉惯性系统)、Fast-Planner(快速规划)等算法上处于世界顶尖水平,大量开源代码滋养了全球产业。 |
三、前沿:李飞飞“空间智能”与大模型如何重塑导航?
1. 核心理念:从“画地图”到“懂世界”
2. “大模型导航”在全球的探索与应用案例
四、国内研究生/博士科研方向建议(2026版)

Petter留德
更多留德资讯请扫码加V咨询
微信号丨heshenhaiyan
声明:本文部分配图来源于网络,如涉及版权问题请联系本人删除。文中数据来源于公开信息整理,部分为合理估算,仅供参考。任何基于此信息的决策与本人无关,如需专业建议请单独咨询。