


导读:本报告基于上海仙工智能上市招股书披露的主营业务、核心技术与发展战略,依托六棱镜全球产业科技情报分析系统PatNavi,就专利布局对企业主营业务、核心技术、未来发展战略的匹配支撑情况展开分析,研判公司所属机器人控制器赛道技术创新发展趋势。

专利布局与主营业务
的匹配支撑
公司主营业务涵盖机器人控制器、智能机器人整机、软件系统、配套零部件四大板块,现有专利布局与各业务板块的核心产品形成了对应关系,为产品的研发与落地提供了知识产权层面的支撑。
♢ 在机器人控制器业务板块
专利布局覆盖了控制器核心功能的研发与设计。其中申请号CN201621050579.3、发明名称为《一种机器人控制系统》的专利,针对机器人控制系统的核心架构进行了保护;申请号CN201620121063.7、发明名称为《一种移动机器人嵌入式数据链集成系统》的专利,针对移动机器人数据集成与传输环节进行了技术保护,上述专利与公司SRC系列机器人控制器的核心功能研发形成了直接的对应关系,为控制器产品的技术实现提供了专利支撑。
♢ 在智能机器人整机业务板块
专利布局覆盖了公司全品类整机产品的核心结构与功能设计。针对移动机器人通用底盘,申请号 CN201530502149.5、发明名称为《移动机器人底盘》的专利,对底盘产品的形状与结构进行了保护,为各类整机产品提供了通用化移动平台的专利基础;针对机器人自主充电配套结构,申请号CN201620016776.7、发明名称为《一种移动机器人自主充电桩》的专利,对充电桩的外壳、充电座组件、弹性防护结构等核心部件进行了保护,解决了移动机器人续航的核心痛点;针对不同场景的整机产品,申请号CN201820489774.9、发明名称为《室内巡检机器人小车》的专利,申请号CN202121401049.X、发明名称为《自动叉车的安全停止装置》的专利,申请号CN202222455393.8、发明名称为《一种龙门式搬运机器人》的专利,分别对应了巡检机器人、智能叉车、重载搬运机器人等不同品类的整机产品,与公司整机业务的多场景落地形成了匹配。
♢ 在软件系统业务板块
专利布局覆盖了机器人调度、运维、可视化管理等核心软件功能。其中申请号CN202330090852.4、发明名称为《带有移动机器人操控运维图形用户界面的显示屏幕面板》的专利,申请号CN202330406754.7、发明名称为《带有运维操作图形用户界面的显示屏幕面板(AMR 机器人)》的专利,针对机器人运维管控的软件交互界面进行了保护,与公司M4AI一体化调度平台、Meta可视化运维软件的功能实现形成了对应关系,为软件系统的商业化落地提供了专利支撑。
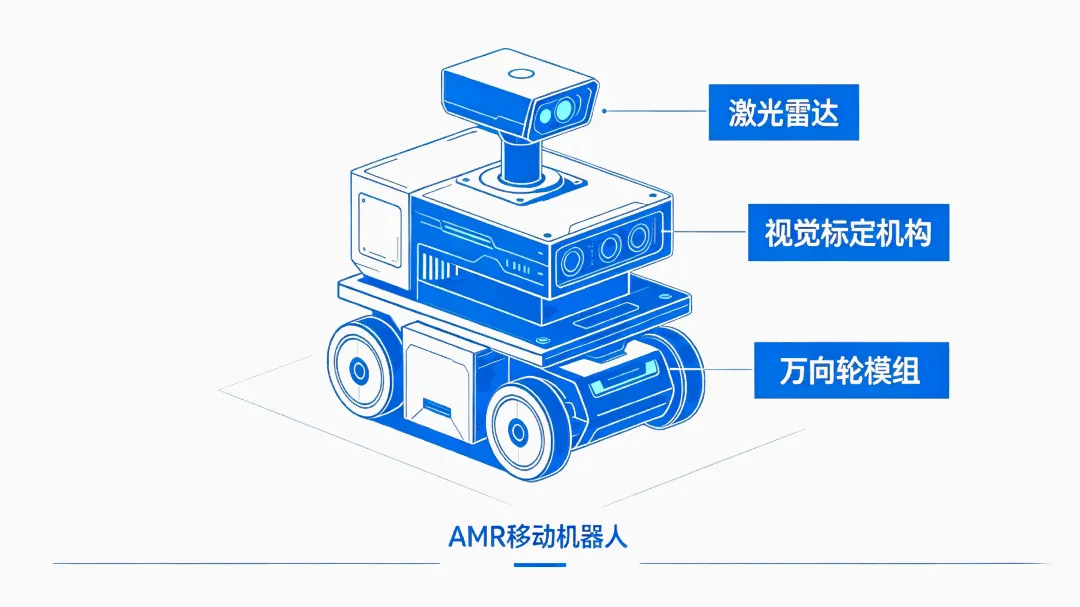
♢ 在配套零部件业务板块
专利布局覆盖了驱动器、视觉标定机构、激光雷达组件等核心自研零部件。其中申请号CN201720112744.1、发明名称为《一种驱动器》的专利,针对机器人核心驱动部件进行了保护;申请号CN202121118519.1、发明名称为《一种适用于视觉相机的精度标定机构》的专利,针对视觉定位核心部件的标定结构进行了保护;申请号CN202321461475.1、发明名称为《一种激光传感器安装调节机构及激光雷达组件》的专利,针对激光雷达的安装与调节结构进行了保护,上述专利与公司配套零部件的自研业务形成了直接匹配,为供应链自主可控提供了专利基础。
专利布局与核心优势技术
的匹配支撑
公司招股书披露的核心技术涵盖异构控制器硬件架构、多模态SLAM环境感知导航、通用模块化开发平台、工业机器人专用大模型、集群大规模调度算法五大方向,现有专利布局与核心技术的研发方向形成了协同关系,为技术的落地与迭代提供了知识产权支撑。
▎全自研异构控制器硬件架构技术方向
申请号CN201621050579.3《一种机器人控制系统》、CN201620121063.7《一种移动机器人嵌入式数据链集成系统》等专利,针对控制器的硬件集成、实时运算、数据传输等核心技术环节进行了保护,与该技术方向的研发形成了对应关系,为控制器核心软硬件的自主研发提供了专利基础。

▎多模态SLAM环境感知导航算法技术方向
申请号CN201920510907.0《一种万向轮模组及具有该万向轮模组的激光引导运输车》、CN202321461475.1《一种激光传感器安装调节机构及激光雷达组件》、CN202121118519.1《一种适用于视觉相机的精度标定机构》等专利,针对激光与视觉导航的核心硬件结构、标定方式、适配场景进行了保护,与该技术方向的多模态融合导航、无轨自然导航等核心研发内容形成了匹配,为导航算法的场景落地提供了硬件层面的专利支撑。
▎机器人通用模块化开发平台技术方向
申请号CN202220439642.1《一种机器人装夹装置、载板料盒、复合机器人》、CN202221225569.4《一种载板料盒收纳架及其复合机器人》等专利,针对机器人的标准化结构、模块化组装接口进行了保护,与该技术方向的标准化软硬件接口、积木式机器人开发等核心内容形成了对应关系,为模块化开发平台的功能实现提供了专利基础。
▎工业机器人专用大模型落地与集群大规模调度算法技术方向
申请号CN202330090852.4《带有移动机器人操控运维图形用户界面的显示屏幕面板》、CN202330406754.7《带有运维操作图形用户界面的显示屏幕面板(AMR 机器人)》等专利,针对机器人集群调度、运维管控的软件交互与功能实现进行了保护,与该技术方向的多机协同调度、AI大模型工业场景适配等研发内容形成了匹配,为相关技术的商业化落地提供了专利支撑。
专利布局对未来发展战略
的匹配支撑
公司招股书披露的未来发展战略聚焦技术底座深耕、产品矩阵拓展、开放平台生态建设、行业与全球化扩张、商业化降本增效五大方向,现有专利布局为上述战略的落地提供了前瞻的知识产权储备。
▣技术底座深耕战略方向
现有专利覆盖了控制器全系列研发、具身智能控制、SLAM导航、AI大模型等核心技术方向,相关专利为SRC高端具身控制器迭代、人形机器人通用控制底座打造、工业机器人大模型相关研发提供了专利基础,与技术底座深耕的战略方向形成了匹配。
▣ 产品矩阵拓展战略方向
现有专利覆盖了工业AMR、智能叉车、轮式人形机器人、移动机械臂等全品类产品,以及控制器、软件系统等业务板块,其中申请号CN202430585994.2《人形机器人(轮式)》、CN202530292858.9《轮式人形机器人(SIR-FTO25-GH)》等专利,针对轮式人形机器人的外观与结构进行了保护,与公司规模化落地轮式人形机器人、完善产品矩阵的战略方向形成了对应。
▣ 开放平台生态建设战略方向
针对模块化开发平台、标准化软硬件接口的相关专利,为公司扩大上下游合作伙伴规模、输出标准化开发工具提供了专利支撑,与开放平台生态建设的战略方向形成了匹配。
▣ 行业与全球化扩张战略方向
现有专利覆盖了新能源、半导体、生物医药等工业场景的核心应用技术,同时拥有申请号JP2023009993D、发明名称为《機能安全制御機器》的海外专利,为公司深耕国内高景气赛道、拓展海外市场提供了一定的知识产权储备,与全球化扩张的战略方向形成了对应。
▣ 商业化降本增效战略方向
针对核心零部件自研、供应链配套的相关专利,为公司依托规模效应摊薄研发与生产成本提供了技术基础,与商业化降本增效的战略方向形成了匹配。
综上,上海仙工智能的现有专利布局,与公司招股书披露的主营业务、核心优势技术、未来发展战略形成了较好的匹配关系,专利覆盖了机器人从硬件到软件、从整机到配套、从技术研发到场景应用的多个环节,为公司核心产品的研发落地、核心技术的持续迭代、未来发展战略的推进提供了知识产权层面的支撑。
机器人控制器赛道
技术发展趋势
仙工智能所处的工业机器人与智能装备行业,技术创新正从传统本体制造向智能化、具身化、多模态融合的前沿方向快速发展,行业技术研发与产业化落地深度融合,创新主体呈现企业与院校科研机构双轮驱动的格局,整体进入高质量发展的新阶段。
核心技术赛道与前沿热点
行业核心技术赛道围绕工业机器人全链条展开,前沿热点呈现三大核心方向:
一是多模态具身智能成为行业技术竞争的核心制高点,技术研发聚焦多模态感知融合、具身智能控制模型、动作预测与轨迹规划,通过融合多维度信息提升机器人的环境适应性与任务执行精度;
二是工业机器人基础核心技术持续迭代升级,围绕运动控制算法、感知模块集成、控制系统架构优化展开,传感器融合、高精度定位、自主路径规划成为技术升级的核心方向;
三是产业化落地技术稳步发展,技术研发持续向工业场景落地需求倾斜,重点解决工业场景下的协同作业、高效计算、结构适配等实际问题。

赛道新锐企业玩家
苏州艾利特机器人有限公司专利布局聚焦工业机器人本体与安全控制,核心专利包括《一种可识别本体结构的模块化工业机器人》《一种确保机器人速度和动量边界限制的安全系统》,围绕模块化机器人结构设计、多维度安全控制系统构建,形成了高灵活性、高可靠性的工业机器人技术体系。
上海飒智智能科技有限公司核心专利包括《一种具身智能行为移动机器人实现方法》《一种多移动机器人的多模态融合感知架构及方法》,围绕具身智能行为实现、多移动机器人多模态融合感知、边缘计算控制架构,构建了自主决策、协同作业的移动机器人技术体系。
天津赛威工业技术有限公司核心专利包括《一种基于高精度控制与智能运维的工业机器人系统》《一种基于多模态感知与智能决策的电子元件组装系统》,围绕工业机器人高精度控制、智能运维、多模态感知精密组装,形成了适配高端制造场景的全流程工业机器人解决方案。
广东原点智能技术有限公司核心专利包括《一种基于激光 SLAM 的机器人码垛控制系统》《一种基于激光SLAM的机器人码垛控制方法》,围绕激光 SLAM三维地图构建、仓储场景精准定位与码垛控制,解决了复杂仓储环境下机器人识别与定位难题,形成了适配物流仓储场景的核心技术体系。
史河机器人 (合肥) 有限公司核心专利包括《一种多模态具身智能控制方法、装置及电子设备》《基于多模态自回归模型的具身智能模型的训练方法及装置》,围绕多模态具身智能控制、多模态自回归模型训练,通过多视角图像与任务文本融合,引入轨迹与关键点监督,显著提升了机器人感知完整性与动作预测准确率,形成了差异化的具身智能技术优势。
赛道新锐院校及科研机构玩家
福州大学核心专利包括《一种多异构移动机器人控制系统》《一种多工业机器人的协同控制方法》,围绕多异构工业机器人协同控制、通用控制架构设计,实现了不同品牌异构机器人的统一控制与数据同步,为行业提供了通用化的协同控制技术方案。
华南理工大学核心专利包括《一种移动机器人目标导航系统及其导航方法》《一种融合激光雷达和视觉特征码的移动机器人定位方法》,围绕移动机器人自主定位、目标导航、多传感器融合,通过激光雷达与视觉特征融合,克服了单一传感器定位的局限性,提升了机器人导航的精度与稳定性。
重庆工业智能技术研究院核心专利包括《一种具身智能机器人的信息交互方法及系统》《一种多模态具身智能机器人控制方法及装置》,围绕具身智能机器人多模态感知融合、信息交互、分层控制,解决了多源感知数据同步精度不足、异构数据融合效率低的问题,显著提升了机器人在复杂动态环境下的自适应能力。
山东新一代信息产业技术研究院有限公司核心专利包括《基于激光视觉耦合的机器人重定位方法、装置、设备及介质》《基于激光雷达扫描信息的移动机器人定位方法及系统》,围绕激光视觉耦合重定位、多传感器融合目标识别、粒子滤波定位算法优化,实现了跨室内外场景的机器人高精度重定位,改善了大尺度地图中机器人定位的稳定性与精度。
未来,仙工智能所处的工业机器人与智能装备行业,技术将持续向高智能化、高环境适应性、全工业场景覆盖的方向发展,多模态具身智能仍将是行业技术竞争的核心赛道,企业与院校的协同创新将进一步加速技术从实验室向产业化落地的进程,行业整体将向更智能、更高效、更适配高端制造需求的方向持续升级。
免责说明:本报告基于六棱镜 PatNavi 系统数据、上市公司招股说明书等公开信息整理分析,仅为行业研究与市场参考使用,不构成任何投资建议、交易依据或专业操作指导。报告中涉及的专利数据、市场份额、营收估值、产品规划等信息均为公开资料整理所得,数据时效性、准确性受信息更新、市场变动影响,存在一定不确定性。本报告所有观点与结论仅为客观研究分析,部分内容和图片由AI生成,不代表任何机构立场,任何人依据本报告内容做出的决策及产生的相关风险,均由其自行承担,我方不承担任何法律责任。
往期推荐

END
点击
阅读原文
查看大赛详情
![[花旗vs野村研报] 端午文旅数据现分歧:同样的假期,两份研报为何给出冷热不同的判断](https://www.txdnet.com/zb_users/theme/Zit/style/bg.jpg)